








服務(wù)熱線
0755-83044319

發(fā)布時間:2024-05-25作者來源:薩科微瀏覽:1466

作者 | cao sir
去年3月14日,大洋彼岸的OpenAI正式發(fā)布其里程碑之作GPT-4,引起了行業(yè)轟動,今年過年期間,大洋彼岸的Open AI又扔出了另一款重磅級的科技產(chǎn)品SORA,代表著繼文字生成和圖片生成以后,視頻生成已經(jīng)成為可能。而在5月13號Open AI又發(fā)布了GPT-4o:能接受文本、音頻和圖像的任意組合輸入,還能生成文本、音頻和圖像的相關(guān)回應(yīng)。

如果傳統(tǒng)汽車可以用四個輪子加一個沙發(fā)來概括,那么智能汽車將會是四個輪子加一個超級計算機。傳統(tǒng)汽車雖然也有電子功能,但更多的是簡單邏輯處理,功能固化無法升級迭代,而智能化時代汽車不僅有強大的數(shù)據(jù)處理能力,開放的API接口,可以支持軟件快遞開發(fā)和迭代,從而極大地提升了娛樂體驗的維度。

智能座艙包括操控系統(tǒng)、娛樂系統(tǒng)、空調(diào)系統(tǒng)、通信系統(tǒng)、座椅系統(tǒng)、交互系統(tǒng)、感知系統(tǒng)等給駕駛員和乘客更加安全、舒適、智能的駕乘體驗。目前幾乎所有車廠都在智能座艙領(lǐng)域發(fā)力,即使連以保守著稱的日系車,也開始在車內(nèi)使用了大屏。
智能駕駛更是智能汽車的當紅C位,最近許多新勢力車企發(fā)布會上,必然會單獨開一個章節(jié)講自己的城市NOA體驗以及開城計劃,可以說城市NOA儼然已經(jīng)成為代表汽車智能化水平的標志。
智能網(wǎng)聯(lián)的目標是實現(xiàn)車與X(車、路、人、云端等)之間的智能信息交換、共享,且具備復(fù)雜環(huán)境感知、智能決策、協(xié)同控制等功能。智能網(wǎng)聯(lián)的重要標志是V2X,但是客觀地講目前V2X的應(yīng)用場景還不夠豐富,未來隨著道路基礎(chǔ)設(shè)施建設(shè)的不斷發(fā)力,在“智慧的路”上跑“聰明的車”將會成為新常態(tài)。除此之外,智能網(wǎng)聯(lián)還支持將車輛運行數(shù)據(jù)上傳到云端,并在云端重構(gòu)車輛運行狀態(tài),這種數(shù)字孿生技術(shù)在遠程故障檢測和診斷都有著深刻的應(yīng)用。
智能底盤包括線控轉(zhuǎn)向,線控制動和線控懸架,在智能化時代,利用感知、決策、執(zhí)行模型,通過如人類”小腦”般精準調(diào)節(jié)車輛X、Y、Z三個方向運動維度,大大提升車輛運動姿態(tài)。市場上代表性產(chǎn)品有理想”魔毯”底盤,比亞迪“云輦”底盤以及實現(xiàn)車輛”橫著走”的智己L6”靈蜥”底盤。
汽車電子是實現(xiàn)汽車演化的重要載體,從1908年世界上[敏感詞]個使用電池供電的汽車揚聲器至今,汽車電子無論形態(tài)還是內(nèi)核都發(fā)生了深刻的變化,在智能化時代,各大車企主要圍繞“場景定義智能”,“數(shù)據(jù)定義體驗”,“軟件定義汽車”三大主場、寸土必爭,因此,汽車電子要做到“兩高”、“兩底”、“兩可以”。
1、高集成


在電動化時代,緩解續(xù)航里程焦慮,除了發(fā)展快充技術(shù)以外,降低整車能耗也是有效途徑之一,比如現(xiàn)在許多高性能電機的逆變器使用了SiC功率模塊,可以使電動汽車整體能效提高 5%,從而使續(xù)航里程延長 5%。也就是說配備 100kW 電池、續(xù)航里程為 500 公里的電動汽車,如果使用SiC 功率模塊的主驅(qū)逆變器,那么它的行駛里程則可達 525 公里,相當可觀。除了高壓汽車電子部件以外,統(tǒng)計數(shù)據(jù)顯示,新能源汽車的整車低壓功耗每降低50w,在一個放電循環(huán)周期內(nèi)可以增加續(xù)航里程10km,為此汽車電子要考慮降低功耗。


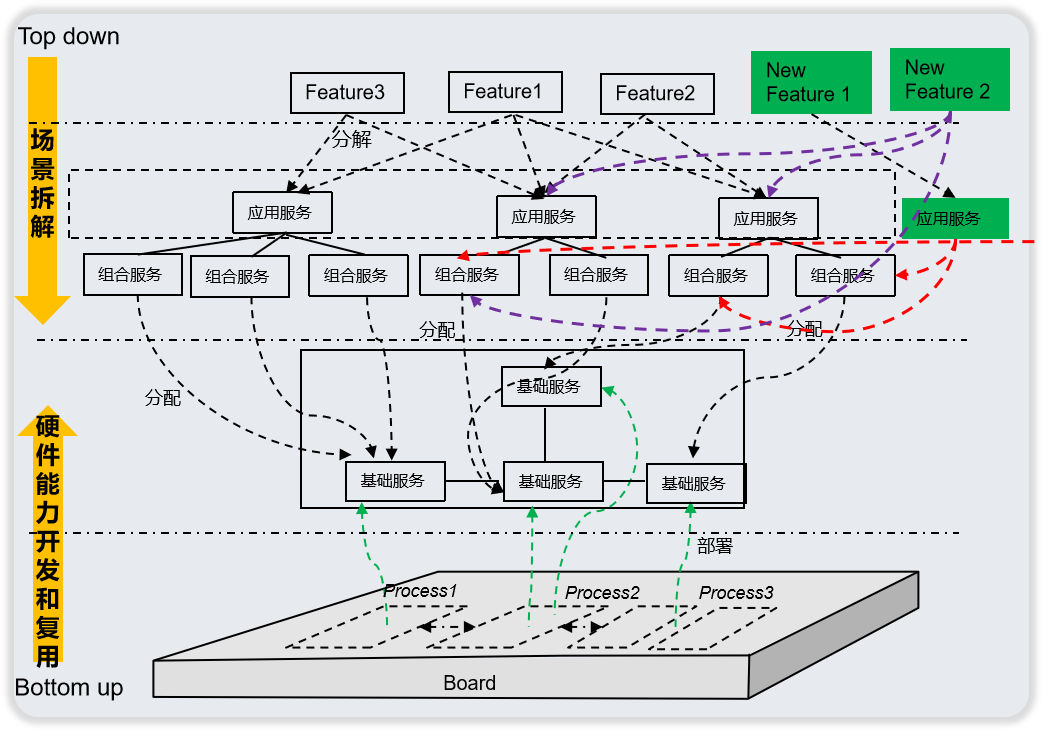
在汽車智能化時代,OTA技術(shù)讓功能和體驗不斷更新成為可能,為滿足快速頻繁迭代的需求,以AUTOSAR為代表的分層式軟件架構(gòu),將中間RTE(Runtime Environment)作為虛擬功能總線VFB(Virtual Functional Bus)的實現(xiàn),解耦了上層的應(yīng)用軟件層(Application Layer)與下層的基礎(chǔ)軟件(Basic Software)的強關(guān)聯(lián)性。并通過SOA服務(wù)軟件架構(gòu),將汽車上一個一個原子化的功能服務(wù)化,通過定義良好的接口和協(xié)議進行隨意編排、組合從而實現(xiàn)不同智能化場景并大大降低了開發(fā)周期和成本。
6、可信可靠

前面講了汽車智能化上半場主要集中在智能座艙,智能駕駛,智能網(wǎng)聯(lián),智能底盤四個領(lǐng)域發(fā)力,智能化下半場隨著AI大模型上車,L3加速落地,艙駕一體式中央大腦等標志性事件已經(jīng)拉開序幕,將會對汽車電子發(fā)展產(chǎn)生深遠影響。

首先,同樣采用Transformer作為底層技術(shù)的自動駕駛成為汽車行業(yè)最先想到的大模型落地方向。例如這兩年在智駕領(lǐng)域大火的端到端自動駕駛,就是使用大模型來做到感知決策一體化,而特斯拉的FSD Beta V12版本用神經(jīng)網(wǎng)絡(luò)替換了33萬行C++代碼。放眼國內(nèi),各大車企之間基于大模型能力開展的NOA開城戰(zhàn)正在如火如荼地進行中。
其次,隨著以ChatGPT-4為代表的大語言模型成熟,語言大模型在智能座艙語言識別方面應(yīng)用方興未艾,去年以來,吉利、長城、紅旗、東風(fēng)日產(chǎn)、嵐圖等車企宣布與百度文心一言合作,廣汽、奇瑞將搭載科大訊飛的星火大模型,華為盤古大模型將上車問界M9,阿里通義千問在智己汽車首秀。在2024年的CES展上,奔馳發(fā)布的全新MB.OS車機系統(tǒng)搭載了全新虛擬助理,利用大型語言模型提供更自然的人機對話。
第三,AI大模型上車另一個重要應(yīng)用場景是允許車主成為智慧座艙開發(fā)者。在4月16日Create 2024百度AI開發(fā)者大會上,李彥宏提到“過去開發(fā)者用代碼改變世界;未來自然語言將成為新的通用編程語言,你只要會說話,就可以成為一名開發(fā)者,用自己的創(chuàng)造力改變世界“,也就是說,未來,每位車主都將享有在車內(nèi)自主創(chuàng)建AI原生智艙應(yīng)用的便利,這些應(yīng)用將能夠充分利用車輛的各種功能。相較于當前基于SOA服務(wù)的自主開發(fā)模式,這一新方法將更為簡易,為車主帶來前所未有的個性化體驗。另外,隨著AI大模型逐步上車,近期對AI 算力的總需求約 500~600TOPS ,中長期 1000TOPS 左右,在不同類型芯片算力發(fā)展方面,經(jīng)典的CPU“摩爾定律”增速放緩, GPU AI 算力的 “黃氏定律”和大模型算法的“規(guī)模法則” 共同推動 AI 芯片算力的“非線性”發(fā)展。
2、L3加速落地

感知冗余:自動駕駛系統(tǒng)需要依靠多種傳感器(如雷達、攝像頭、激光雷達等)來感知周圍環(huán)境。感知冗余意味著系統(tǒng)具有多個相同或不同類型的傳感器,以在其中一個傳感器失效時,其他傳感器仍然能夠正常工作,提供準確的環(huán)境感知數(shù)據(jù)。
計算冗余:自動駕駛系統(tǒng)需要強大的計算能力來處理和分析來自傳感器的數(shù)據(jù)。計算冗余可以通過使用多個處理器或計算機來實現(xiàn),以確保在一個處理器或計算機出現(xiàn)故障時,其他處理器或計算機能夠繼續(xù)執(zhí)行關(guān)鍵任務(wù)。
制動冗余:制動系統(tǒng)是自動駕駛汽車的重要組成部分,負責(zé)在必要時減速或停車。制動冗余可以通過使用多個制動系統(tǒng)或備用制動系統(tǒng)來實現(xiàn),以確保在主要制動系統(tǒng)失效時,車輛仍然能夠安全停車。
轉(zhuǎn)向冗余:轉(zhuǎn)向系統(tǒng)負責(zé)控制車輛的行駛方向。轉(zhuǎn)向冗余可以通過使用多個轉(zhuǎn)向執(zhí)行器或備用轉(zhuǎn)向系統(tǒng)來實現(xiàn),以確保在主要轉(zhuǎn)向系統(tǒng)失效時,車輛仍然能夠按照駕駛員或系統(tǒng)的指令進行轉(zhuǎn)向。
通信冗余:自動駕駛汽車需要與周圍環(huán)境和其他車輛進行通信,以獲取實時交通信息和避免碰撞。通信冗余可以通過使用多種通信協(xié)議和備用通信通道來實現(xiàn),以確保在主要通信通道失效時,車輛仍然能夠接收和發(fā)送關(guān)鍵信息。
電源冗余:配備主電源系統(tǒng)和備份電源系統(tǒng),采用電源隔離設(shè)計,確保每個系統(tǒng)都能獨立供電。同時前面提到的傳感器、智駕控制器、制動/轉(zhuǎn)向控制器要支持雙電源輸入,當有一路輸入出現(xiàn)故障時,維持系統(tǒng)正常工作。
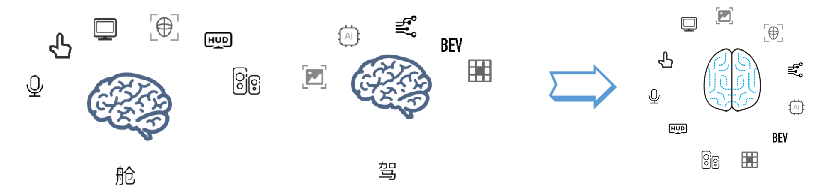
3、艙駕一體化中央大腦
艙駕一體化指的是將座艙域和智能駕駛域集成到一個高性能計算單元中,以同時支持智能駕駛和智能座艙功能。通過硬件和軟件的融合,艙駕一體化能夠顯著減少域控和芯片的投入,降低線束數(shù)量,從而節(jié)省成本,例如,通過共用一套冷卻系統(tǒng),共享內(nèi)存,共享算力,可節(jié)省約30%的成本,另外由于艙駕場景的完全打通,不僅帶來了更多的功能,還提升了功能體驗。
艙駕一體化的實現(xiàn)方式主要有三種:把座艙域PCB板和智駕域PCB板集成在一個控制器盒子的ONE Box方案,將座艙域芯片、駕駛域芯片以及高效的CPU進行集成在一塊PCB板子上的ONE Board方案,用一塊芯片做智艙和智駕功能的ONE Chip方案。目前芯片巨頭英偉達、高通都官宣自己的艙駕一體芯片在2025年左右推出。
俗話說“理想很豐滿現(xiàn)實很骨感”,摘下艙駕一體化的桂冠并沒有想象中的容易,目前還存在許多挑戰(zhàn):
1、SoC芯片的挑戰(zhàn):座艙芯片主要承擔圖形處理等計算任務(wù),對GPU算力要求高;而智駕芯片則主要負責(zé)深度學(xué)習(xí)等任務(wù),對NPU算力有特定要求。因此,在艙駕一體化中,需要找到能同時滿足這兩種不同計算需求的SoC芯片,這是一個技術(shù)上的挑戰(zhàn)。
AI大模型在汽車智能化中扮演著至關(guān)重要的角色。這些模型能夠處理海量的數(shù)據(jù),通過深度學(xué)習(xí)和自我優(yōu)化,不斷提升對復(fù)雜路況和駕駛環(huán)境的感知與判斷能力。這使得汽車能夠更準確地預(yù)測和應(yīng)對各種駕駛情況,從而提高行車的安全性和舒適性。
L3智能駕駛的落地是汽車智能化進程中的又一重要里程碑。L3級別的智能駕駛意味著車輛可以在特定情況下自主駕駛,減輕駕駛者的負擔,提高駕駛的便捷性。然而,這一技術(shù)的實現(xiàn)需要高精度地圖、傳感器以及強大的計算能力等支持,以確保車輛在各種路況下都能安全可靠地行駛。
艙駕一體化則是汽車智能化發(fā)展的另一大趨勢。它將駕駛艙與智能駕駛系統(tǒng)緊密結(jié)合,為駕駛者提供更加人性化、智能化的駕駛體驗。通過艙駕一體化,駕駛者可以更加便捷地控制車輛的各種功能,同時享受更加豐富的娛樂和信息服務(wù)。
免責(zé)聲明:本文采摘自網(wǎng)絡(luò),本文僅代表作者個人觀點,不代表薩科微及行業(yè)觀點,只為轉(zhuǎn)載與分享,支持保護知識產(chǎn)權(quán),轉(zhuǎn)載請注明原出處及作者,如有侵權(quán)請聯(lián)系我們刪除。
友情鏈接:站點地圖 薩科微官方微博 立創(chuàng)商城-薩科微專賣 金航標官網(wǎng) 金航標英文站
Copyright ?2015-2024 深圳薩科微半導(dǎo)體有限公司 版權(quán)所有 粵ICP備20017602號
